行業資訊
主動視覺系統
一個二維視覺系統最明顯的限制是它的移動,只有在X-Y平面旋轉的能力。這導致了一個高質量的需求,三維(3D)的處理技術的使用增加。對于工程師探索用的3D檢測,現在有許多不同的技術可用于創建3D圖像。
對工程師來說最重要的任務是成功地創建一個對工業有用的程序,來獲得所有(x,y,z)方向的高分辨率。根據物體的形狀和大小以及物體與視覺傳感器之間的距離,,可以使用在不同的三維測量方法,以及不同類型的主動視覺系統。
視覺系統由一組設備組成,能在空間和材料屬性的場景將光和測量數據轉換成信息。這些設備有光敏傳感器(一個鏡頭,它集中在一個感光元件或眼睛的圖像)和計算機制(計算機),允許從傳感器收集的信息。
人類可以很容易地區分他們所看到的物體,也能夠在各種不同的光線條件下,從不同的參考幀中識別它們。然而,在視覺系統的情況下,一個像素值的適當的解釋是一個非常困難的任務。此外,像素的亮度取決于幾個因素:
場景幾何-在視覺領域中的對象的形狀和位置;
對象的照明和材料屬性,例如,一個青銅制成的蘋果看起來不同于一個真正的蘋果
環境動力學。
主動視覺系統
一個典型的視覺系統的三維分析的過程中,需要一個深思熟慮的立場來進行檢測,在相對位置的對象和傳感器的變化,掃描,保存在一個共同的坐標系統中收集的數據,并結合大量的圖片到一個三維模型。
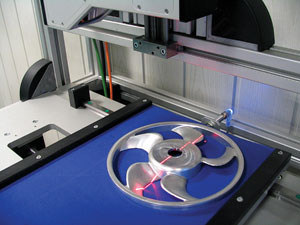
主動視覺系統由兩個裝置、一個相機和一個激光投影儀組成。激光發射光模式,是由物體表面反射,然后使用相機觀察和拍攝。使用特定的光模式被稱為“結構光”,如線條、網格或其他形狀,一個可以掃描場景。
長期結構光被定義為簡單或編碼的光圖案(例如,點,線網格或復雜的形狀)到被照亮的對象的投影。使用結構光的最重要的優點是在圖像中的表面特征細節都很清晰。其結果是,無論是檢測和提取的圖像特征的簡化和代表非常精確。
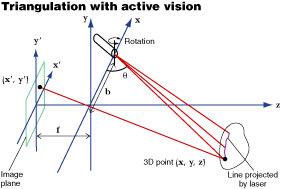
具有主動視覺的三角測量是基于光模式的投影。光線是指向攝像機的對象視圖的字段。測量之前,必須校準激光平面。它應該是這樣的背景表面的光線是平行于x軸和垂直于y軸。
在圖(下),鏡頭位于坐標系統的中心,在焦距(f)從圖像平面(CCD或CMOS傳感器)。基線b是激光和相機之間的線。
激光平面和基線(b)形成一個已知角θ。基線長度計算激光導向,從研究對象反射的光束被放置在中心的x'y矩陣。
基線b可以從這個方程計算:
b=ztanθ
從物體表面反射的這一點被投影到圖像平面上
(X,Y)。的3D點(X,Y,Z),現在可以計算。已知變量b,b,θ,x′,y′,。現在可以從下面的關系計算對象和相機之間的距離
X2=﹣z
y2=﹣z
有了這些關系,現實世界的坐標計算使用以下的計算:
X=-x2-fcotθ
y=-x2-fcotθ
z=-x2-fcotθ
測量程序
在這個測量過程的第一步是建立3D相機拍攝3D圖像或配置文件之前。以下需要設置,以檢索從相機的圖像:
輪廓觸發和速率;
視場(FOV)和沿X軸分辨率;
三維圖像觸發;
長度與Y軸;
沿y軸的三維圖像分辨率。
具有主動視覺的三角測量是基于光模式的投影。
此外,它可能是必要的調整測量設置,以提高圖像的質量。
當這些程序完成后,銀行的圖像大小可調,適應指定的FOV(Field of View)。當執行設置,該設備將開始捕獲圖像,并從所獲得的數據構建一個3D模型。
在圖像采集過程中,一些數據不可避免地丟失。為了幫助填補這些空白,一個“填補缺失的數據”程序,應實施和超越,以提高三維模型。此過程通過內插從周圍的區域的高度值,從而消除從3D圖像或輪廓的選定部分缺少的數據。只有在限定的感興趣區域內的像素中的輸出的影響,但這個區域之外的值被用于內插。
通常,該程序是用來制備用于3D圖像與處理丟失的數據作為一個高度值的程序。雖然此程序主要是設計用于填充丟失的數據的小區域,它可有效地用于任何尺寸的區域內使用。
3D模型已被獲取之后,簡檔可以從沿著由該行的開始和結束點的像素坐標指定的行的3D圖像中提取。在配置文件中的最后一個點的實際位置可以是從指定的結束點稍有不同,由于采樣距離。
在配置文件中的最后一個點與線的終點之間的距離將是至多一半的采樣距離。然而,如果結束點是在圖像邊界的距離是至多一個取樣距離。
過濾和分析
在提取配置文件后,必須對配置文件的選定部分進行篩選,以消除由模型中的光照條件變化所引起的干擾。將得到的配置文件存儲在新的圖像庫中的輪廓測量,并可以作為一個平均值或中值濾波器。
與平均濾波器,在所得到的配置文件中的每一個高度值是在原始配置文件中的相應的高度值周圍的相鄰像素的加權平均。均值濾波的結果是一個平滑的輪廓。
用中值濾波,得到的銀行中的每一個高度值,在原來的配置文件中的對應的高度值周圍的相鄰像素的中位數。中值濾波的結果是一個單一的孤立點或噪聲被刪除,但邊緣被保留的個人資料。鄰域的大小是由濾波矩陣的維數定義的。
感興趣區域
下一步驟是定義區域的感興趣的輪廓,用于指定可以在不影響的間隔以外的信息應用的測量程序的輪廓的間隔。感興趣的區域是通過指定所創建的x坐標,其中它開始(Ⅹ開始像素),和感興趣的寬度的區域。
接著,輪廓的選定部分與它的特征點,如局部最大值,最小值,和拐點一起進行分析。待分析與一個定義的感興趣區域所指定的信息的部分中。應當指出的是,主動視覺方法遇到了一些材料的困難。它具有均勻的反射材料性能最佳。材料如玻璃產生過表面深度區多次反射,降低或禁止準確的測量范圍。有光澤的表面被反射的直接表征。
取決于照明和觀察幾何形狀,可能會在表面反射,由于其能量不足發生斑點。從表面有光澤多次反射的拐角區域也能產生野生測量。在一般情況下,基于有源三角測量范圍的攝像機能夠非常精確的。
- 上一篇:用機器視覺精確測量
- 下一篇:三維視覺系統進行繩磨損分析
最新動態
- [2017-05-26]視覺引導機器人自動化石油工具組件...
- [2017-05-24]計算機視覺系統從圖像采集卡得到幫助...
- [2017-05-22]機器視覺在IIoT(工業物聯網)...
- [2017-05-19]內置機器:嵌入式機器視覺系統,替代P...
- [2017-05-17]視覺庫或視覺特定的集成開發環境...
最新新聞
- [2024-10-10]展會預告 | 銳視光電與您相約Vision C...
- [2024-09-30]銳視光電國慶放假通知!
- [2024-09-14]中秋佳節,銳視光電祝您闔家團圓!...
- [2024-08-27]轉角條紋光源:2.5D光源的進階應用...
- [2024-07-01]展會預告 | 銳視光電與您相約Vision C...